معرفی محیط متحرک سازی كتيا
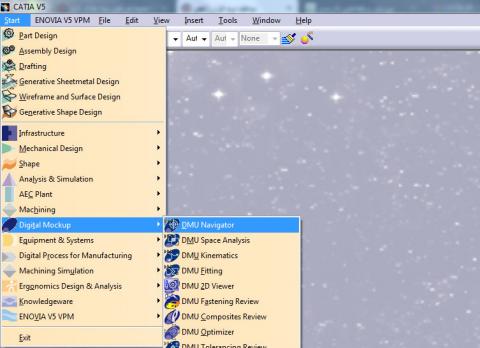
مسیر ورود به این محیط از منوی Start بخش Digital Mockup و در نهایت DMU Kinematics میباشد.
DMU KINEMATICS SIMULATOR یکی از بخشهای مهم مجموعه Product Synthesis است که در آن مکانیسم شبیهسازی و تحلیل میشود. این مکانیسم میتواند مکانیسم حرکت یک بیل مکانیکی یا مکانیکی یا مکانیسم باز شدن ارابه فرود یک هواپیما باشد. در واقع در این محیط ویژگی حرکت (به محصول افزوده میشود)
در DMU KINEMATICS SIMULATOR ارتباط قطعات با استفاده از 16 نوع اتصال (Joint) برای رسیدن به یک مکانیسم مناسب برقرار میشود. این اتصالات که هرکدام از آنها حرکت ویژهای را تأمین میکنند در نوار ابزار DMU Kinematics Simulatorematics Joints قرار گرفته است.
امتیاز مثبت محیطهای کاری CATIA V5 برقراری ارتباط آسان با کاربر در عین قدرتمندی آنها میباشند. تمام دکمهها و پنجره فرمانها هوشمندانه طراحی شدهاند و به نوعی کاربر را در انتخاب عناصر مورد نیاز برای اجرای یک فرمان راهنمایی میکنند. نمونهای از این خصوصیت در شکل بالا نشان داده شده است. این قوانین در طراحی رابط گرافیکی کاربر (Graphic User Interface – GUI) نرمافزار رعایت شده است و باعث کاهش زمان آموزش نیروی انسانی برای کاربری این نرمافزار شده است.
پیشتر، تفاوت مونتاژ قطعات در محیط کاری طراحی مونتاژ و ایجاد یک مکانیسم بیان شد؛ اما قیدهایی که در ASD بر قطعات یک مجموعه مونتاژی قرار داده میشوند میتواند با استفاده از ابزاری به اتصالهای DMU KINEMATICS SIMULATOR تبدیل شوند و دیگر نیازی به مونتاژ دوباره قطعات برای ساخت مکانیسم نیست.
پس از ایجاد مکانیسم، با تحلیل آن امکان حرکت برای مکانیسم با توجه به اتصالات داده شده بررسی میشود. همچنین طراح میتواند با استفاده از ابزارهای ساده مکانیسم را از نظر حداقل فواصل بین قطعات مختلف در حین حرکت و برخوردهای احتمالی بررسی کند. مکانیسم به محض برخورد قطعات از حرکت باز میایستد تا طراح در جهت رفع اشکال برآید.
برای بررسی کارایی مکانیسم در حین حرکت آن، سرعتها و شتابهای خطی و زاویهای قطعات قابل اندازهگیری و در گرافهایی قابل مشاهده است. با استفاده از ابزار Sensor میتوان مقدار حرکت اجزای یک مکانیسم را طی متحرکسازی آن در نمودارهایی به صورت وابسته به زمان رسم کرد. به عنوان مثال میتوان طی باز شدن یک جک هیدرولیک در طی 15 ثانیه مکان سر جک را در زمانهای مختلف نسبت به یک مبنا در گرافی مشاهده کرد.
در شبیهسازی مکانیسم میتوان عنصر زمان را دخالت داد و زمانبندی حرکت قطعات نسبت به هم را تغییر داد. با استفاده از این قابلیت تقدم و تأخر اجرای حرکاتها در شبیهسازی تنظیم میشود. به عنوان مثال حین فرود یک هواپیما انتظار داریم که ابتدا درب محفظه ارابه فرود هواپیما باز شود و سپس ارابه فرود باز شود و در موقعیت مناسب قرار گیرد و در انتها درب محفظه به محل خود بازگردد. این ترتیب زمانی باعث استفاده از ابزار Simulation with Law میشود.
در تمامی محیطهای کاری CATIA V5 این امکان وجود دارد که کاربر از کارهایی که در محیط نرمافزار انجام میدهد عکس یا فیلم تهیه کند. این قابلیت در DMU KINEMATICS SIMULATOR نیز به طراح کمک میکند که از متحرکسازی مکانیسم فیلم تهیه کند و نحوه حرکت مکانیسم را در آن نمایش دهد.
ابزار دیگری با نام Swept Volume مکان هندسی یک قطعه را در حین حرکت در فضا از لحظه شروع تا پایان حرکت به صورت یک حجم ثبت میکند. این حجم همانند فایل یک قطعه ذخیره میشود. حجم ایجاد شده فضایی را که قطعه مورد نظر در حین حرکت از آن عبور میکند نشان میدهد و با استفاده از آن احتمال برخورد با سایر قطعات بررسی میشود.